Robot SCARA: Prototipo Asistencial (TFG)
Diseño de sistemas, planificación de trayectoria optimizada y modelado dinámico para rehabilitación.
Visión General y Propósito Social
El proyecto abordó el diseño, modelado y simulación de un Robot SCARA de 4 GDL como prototipo de asistencia enfocado en la rehabilitación de la motricidad fina y apoyo a la escritura y dibujo en pacientes con movilidad reducida.
El robot funciona como un asistente de guía activa que trabaja conjuntamente con la mano del paciente. El objetivo terapéutico es que, a través de la repetición controlada del estímulo (el trazado de trayectorias), se mejore la función motriz del usuario de manera segura.
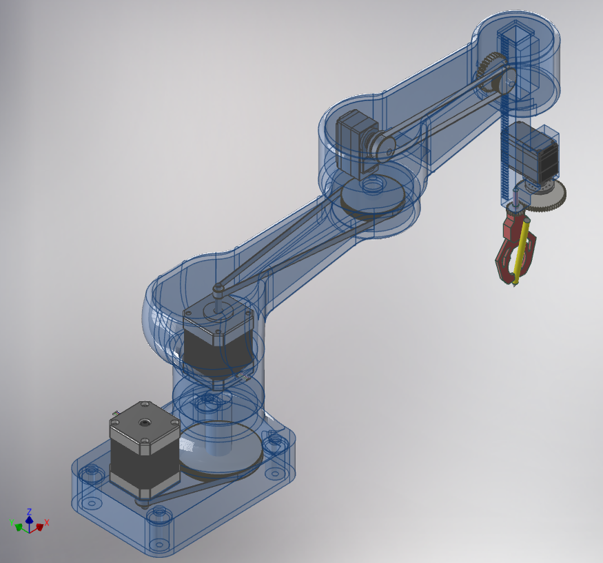
Modelo final en el entorno CAD (SolidWorks), base del análisis de interferencias y dinámico.
Generación de Trayectoria
El sistema inicia con la transformación de un estímulo visual (una imagen o texto a replicar). Algoritmos de reconocimiento de imágenes y detección de bordes se aplican para extraer la forma deseada. La salida de este proceso es una secuencia optimizada de puntos discretos que definen la trayectoria que debe seguir la punta del efector final.
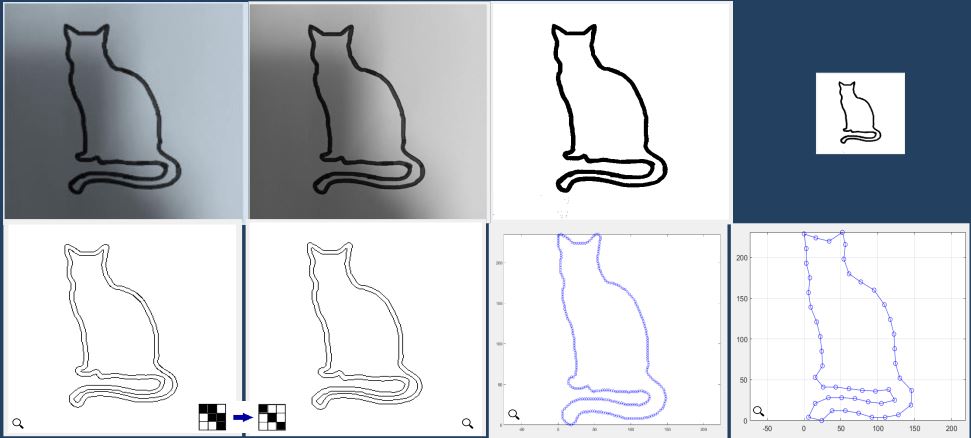
Ilustración del algoritmo de detección de bordes para generar la trayectoria de puntos.
Planificación y Análisis Cinemático/Dinámico
El set de puntos es la entrada para el análisis de movimiento y su optimización. Aplicamos la Cinemática Inversa para convertir los puntos (X, Y) en las consignas de ángulo para los motores. El núcleo de esta fase fue la Optimización Dinámica: se utilizó el Modelado Dinámico (Lagrange-Euler) para calcular las fuerzas requeridas y, crucialmente, para filtrar y reducir las aceleraciones excesivas.
Este proceso asegura que el movimiento sea suave, seguro y ergonómico para la función de guía asistencial. El análisis incluye la visualización de las curvas de aceleración para validar que el movimiento se mantiene dentro de los límites terapéuticos.

Curvas de aceleración: demostración de la reducción de 'picos' para un movimiento asistencial más suave, validando la ergonomía de la trayectoria.
Demostración de Aplicación Industrial
Este GIF ilustra la precisión y velocidad del robot SCARA en una aplicación de montaje en la industria médica, destacando la relevancia de su diseño en entornos de alta precisión y salubridad.

GIF: Demostración de montaje con robot SCARA en la industria médica (Fuente: TOPSTAR Zhang).